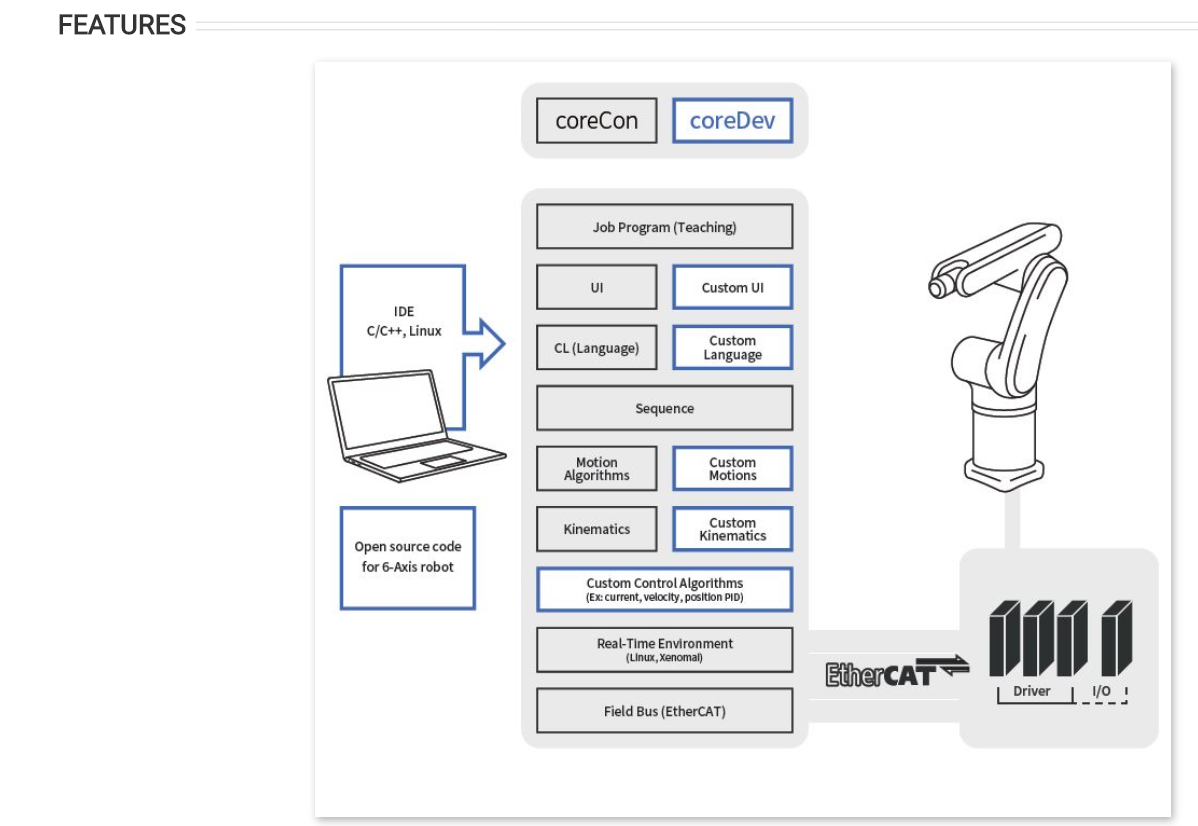
coreDev provides User Interface/Robot Language/ Motion/Control
Algorithms in plug-in form to the motion controller (i.e. coreCon) and provides
S/W and development environment for easy development. It provides a user S/W
development environment for the development of Kinematics and Motions, Control
Algorithms and Custom UI of the user robot along with coreCon-supported
Teaching, Job Programming Language, Motion Control, Monitoring, and Setting
Functions. coreDev is designed as a plug-in real-time task operation structure
and works with coreCon's builtin function to enable the user's professional
application development. In addition, information provided by the coreCon API (e.g.
joint position/velocity/acceleration, EndEffector’s position/Orientation,
torque feedback from motors, control parameters, etc.) can be used to
effectively apply and develop the robot of the user algorithm.
Features:
- All coreCon’s S/W functions available (teaching, job
programming, monitoring, motion control etc.)
- Real-Time plug-in
structure
- Supports EtherCAT Master, Multi-Axis and Synchrnized
Real-Time Control
- Supports the Real-Time S/W development including QT based
Custom UI, Custom Motions, Custom Kinematics, and Custom Control Algorithms
etc.
- User designed motions and digital filters can be developed
- C/C++ Standard Language Usage
- Open source math lib (such as Eigen) available and built
- Supports the torque operation mode for dynamic based control
such as the impedance control or the gravity compensation
- Provides PID sample source and porting guide of PID code for
ROS
- Provides full-source codes for 6-axis robot’s forward and
inverse kinematics
- Provide all documents for Linux development environment
based on VMware