 |
Sanyo Denki: EtherCAT Interface DC Input Type Servo Amplifier RS2x04A2HA5
SANMOTION R Advanced Model, 48VDC, 24VDC
Highly accurate AC servo systems consisting of compact, high-torque servo motors and servo amplifiers that reduce positioning settling time. With highly responsive command following and vibration controls to minimize machine stand resonance, they contribute to shortened takt time. They are ideal for applications where high precision movement is required, such as semiconductor manufacturing equipment, chip mounters, robots, and machine tools.
EtherCAT Model
Model-based Following Control
Auto Tuning
Vibration Suppression Control
Disturbance Suppression
Homing mode
Position Mode (PP, CSV, IP*)
Velocity Mode (PV, CSV)
Torque Mode (TQ, CST)
Safety Function
*High speed type only
Model No.:
RS2J04A2HA5, RS2K04A2HA5Model No.:
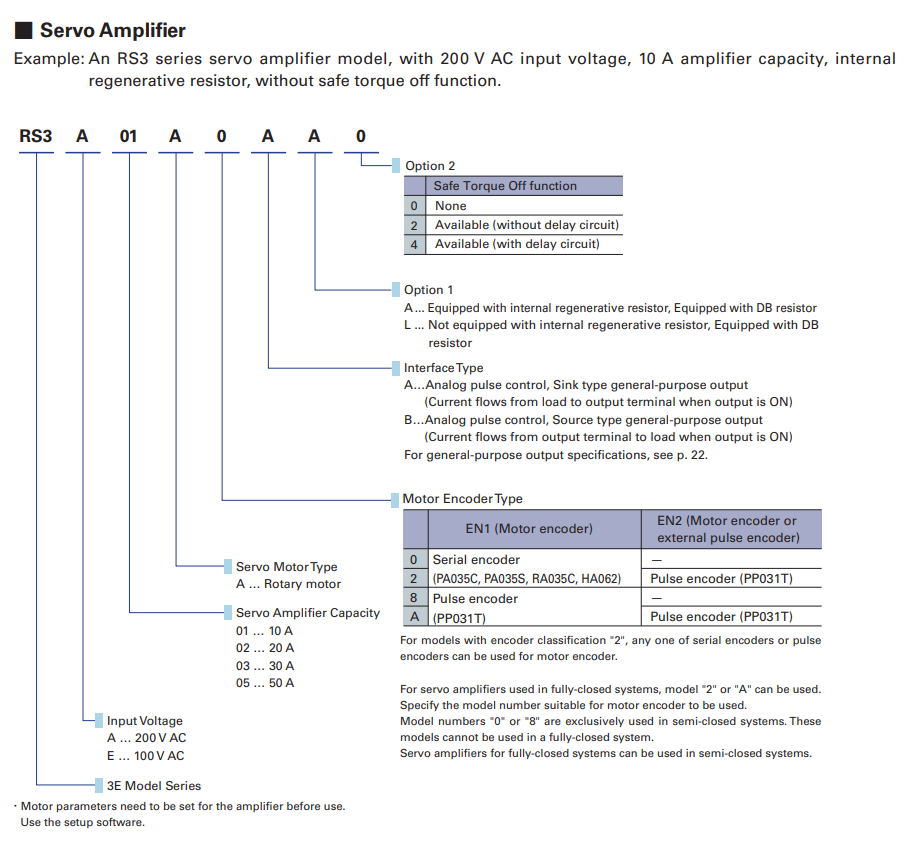
RS3A01A2HA4, RS3A02A2HA4, RS3A03A2HA4, RS3A05A2HA4, RS3A10A2HA4, RS3A15A2HA4
|
Now Available with EtherCAT Interface: EtherCAT is a 100Mbps high-speed fieldbus system, which helps shorten Takt time. It is compatible with Ethernet, and its high versatility enables the creation of a system compatible with a variety of devices. Servo amplifier firmware can be updated via EtherCAT. It is also certified through EtherCAT conformance testing conducted by a third party organization.
Safety Model newly added to lineup: Since this new model safely shuts down motor torque, safety systems are more easily installed on the equipment. This safety function is defined in the ”IEC61800-5-2:Safe Torque Off” and ”IEC60204-1:Stop Category 0”. In addition, this model has acquired ”IEC61508, SIL2/IEC62061,SILCL2” and ”ISO138491:Cat.3,PL=d”.
Built-in Regeneration Resistor: It is possible to choose whether to equip regeneration resistance or not. If the regeneration resistance capability is insufficient, it is possible to use an external regeneration resistance unit.
Built-in Dynamic Brake: A built-in dynamic brake provides emergency stop capability. The six kinds of motion sequences for the dynamic brake can be selected by parameter setting.
Fully-closed loop control: Fully-closed loop control is possible using a linear scale mounted on the device together with high resolution encoder information.
|
|
|